AM 调制器
在本章中,我们将讨论产生调幅波的调制器。以下两个调制器产生 AM 波。
- 平方律调制器
- 开关调制器
平方律调制器
以下是平方律调制器的框图
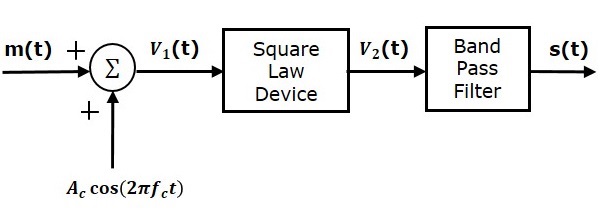
将调制信号和载波信号分别表示为 $mleft ( t ight )$ 和 $Acosleft ( 2pi f_ct ight )$。这两个信号作为加法器(加法器)块的输入。该加法器模块产生一个输出,即调制信号和载波信号的相加。从数学上讲,我们可以将其写为
$$V_1t=mleft ( t ight )+A_ccosleft ( 2 pi f_ct ight )$$
该信号 $V_1t$ 用作二极管等非线性设备的输入。二极管的特性与平方律密切相关。
$V_2t=k_1V_1left ( t ight )+k_2V_1^2left ( t ight )$(公式 1)
其中,$k_1$ 和 $k_2$ 为常数。
将 $V_1left (t ight )$ 代入公式 1
$$V_2left (t ight ) = k_1left [ mleft ( t ight ) + A_c cos left ( 2 pi f_ct ight ) ight ] + k_2left [ mleft ( t ight ) + A_c cosleft ( 2 pi f_ct ight ) ight ]^2$$
$Rightarrow V_2left (t ight ) = k_1 mleft ( t ight ) +k_1 A_c cos left ( 2 pi f_ct ight ) +k_2 m^2left ( t ight ) +$
$ k_2A_c^2 cos^2left ( 2 pi f_ct ight )+2k_2mleft ( t ight )A_c cosleft ( 2 pi f_ct ight )$
$Rightarrow V_2left (t ight ) = k_1 mleft ( t ight ) +k_2 m^2left ( t ight ) +k_2 A^2_c cos^2 left ( 2 pi f_ct ight ) +$
$k_1A_cleft [ 1+left ( ffrac{2k_2}{k_1} ight )mleft ( t ight ) ight ] cosleft ( 2 pi f_ct ight )$
上述等式的最后一项表示所需的 AM 波,而上述等式的前三项是不需要的。因此,借助带通滤波器,我们可以只通过AM波并消除前三个项。
因此,平方律调制器的输出为
$$sleft ( t ight )=k_1A_cleft [1+left ( ffrac{2k_2}{k_1} ight ) mleft ( t ight ) ight ] cosleft ( 2 pi f_ct ight )$$
AM波的标准方程为
$$sleft ( t ight )=A_cleft [ 1+k_amleft ( t ight ) ight ] cos left (2 pi f_ct ight )$$
其中,$K_a$为幅度灵敏度
通过比较平方律调制器,使用AM波的标准方程,我们将得到缩放因子为$k_1$,幅度灵敏度$k_a$为$ffrac{2k_2}{k1}$。
开关调制器
以下是开关调制器的框图。
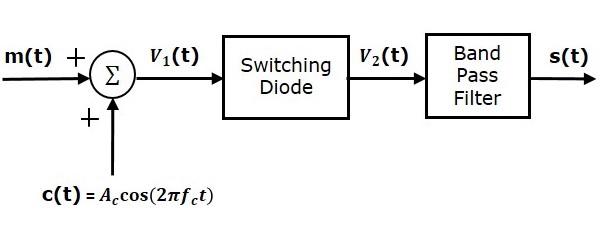
开关调制器类似于平方律调制器。唯一的区别是,在平方律调制器中,二极管以非线性模式运行,而在开关调制器中,二极管必须作为理想开关运行。
让调制信号和载波信号分别表示为 $mleft ( t ight )$ 和 $cleft ( t ight )= A_c cosleft ( 2pi f_ct ight )$。这两个信号作为输入应用于加法器(加法器)块。加法器块产生一个输出,即调制信号和载波信号的加法。从数学上讲,我们可以将其写成
$$V_1left ( t ight )=mleft ( t ight )+cleft ( t ight )= mleft ( t ight )+A_c cosleft ( 2 pi f_ct ight )$$
该信号 $V_1left ( t ight )$ 用作二极管的输入。假设调制信号的幅度与载波信号 $A_c$ 的幅度相比非常小。因此,二极管的开启和关闭动作由载波信号 $cleft ( t ight )$ 控制。这意味着,当 $cleft ( t ight )> 0$ 时,二极管将正向偏置,而当 $cleft ( t ight )< 0$ 时,二极管将反向偏置。
因此,二极管的输出为
$$V_2 left ( t ight )=left{\begin{matrix} V_1left ( t ight )& if &cleft ( t ight )>0 0& if & cleft ( t ight )<0 end{matrix} ight.$$
我们可以将其近似为
$V_2left ( t ight ) = V_1left ( t ight )xleft ( t ight )$(公式 2)
其中,$xleft ( t ight )$ 是周期为 $T=ffrac{1}{f_c}$ 的周期脉冲序列

该周期脉冲序列的傅里叶级数表示为
$$xleft ( t ight )=ffrac{1}{2}+ffrac{2}{pi }sum_{n=1}^{infty}ffrac{left ( -1 ight )^n-1}{2n-1} cosleft (2 pi left ( 2n-1 ight ) f_ct ight )$$
$$Rightarrow xleft ( t ight )=ffrac{1}{2}+ffrac{2}{pi} cosleft ( 2 pi f_ct ight )-ffrac{2}{3pi } cosleft ( 6 pi f_ct ight ) +....$$
代入公式 2 中的 $V_1left ( t ight )$ 和 $xleft ( t ight )$ 值。
$V_2left ( t ight )=left [ mleft ( t ight )+A_c cosleft ( 2 pi f_ct ight ) ight ] left [ ffrac{1}{2} + ffrac{2}{pi} cos left ( 2 pi f_ct ight )-ffrac{2}{3pi} cosleft ( 6 pi f_ct ight )+..... ight ]$
$V_2left ( t ight )=ffrac{mleft ( t ight )}{2}+ffrac{A_c}{2} cosleft ( 2 pi f_ct ight )+ffrac{2mleft ( t ight )}{pi} cosleft ( 2 pi f_ct ight ) +ffrac{2A_c}{pi} cos^2left ( 2 pi f_ct ight )-$
$ffrac{2mleft ( t ight )}{3pi} cosleft ( 6 pi f_ct ight )-ffrac{2A_c}{3pi}cos left ( 2 pi f_ct ight ) cosleft ( 6 pi f_ct ight )+..... $
$V_2left ( t ight )=ffrac{A_c}{2}left ( 1+left ( ffrac{4}{pi A_c} ight )mleft ( t ight ) ight ) cosleft ( 2 pi f_ct ight ) + ffrac{mleft ( t ight )}{2}+ffrac{2A_c}{pi} cos^2left ( 2 pi f_ct ight )-$
$ffrac{2mleft ( t ight )}{3 pi} cosleft ( 6 pi f_ct ight )-ffrac{2A_c}{3pi} cosleft ( 2 pi f_ct ight ) cosleft ( 6 pi f_ct ight )+.....$
上述等式的第一项表示所需的 AM 波,其余项为不需要的项。因此,借助带通滤波器,我们可以只通过AM波并消除其余项。
因此,开关调制器的输出为
$$sleft ( t ight )=ffrac{A_c}{2}left ( 1+left ( ffrac{4}{pi A_c} ight ) mleft ( t ight ) ight ) cosleft ( 2 pi f_ct ight )$$
我们知道AM波的标准方程为
$$sleft ( t ight )=A_cleft [ 1+k_amleft ( t ight ) ight ] cosleft ( 2 pi f_ct ight )$$
其中,$k_a$为幅度灵敏度。
通过比较将开关调制器的输出与AM波的标准方程相乘,可得缩放因子为0.5,幅度灵敏度$k_a$为$ffrac{4}{pi A_c}$。