时间域规范
在本章中,我们将讨论二阶系统的时域规范。下图显示了欠阻尼情况下二阶系统的阶跃响应。
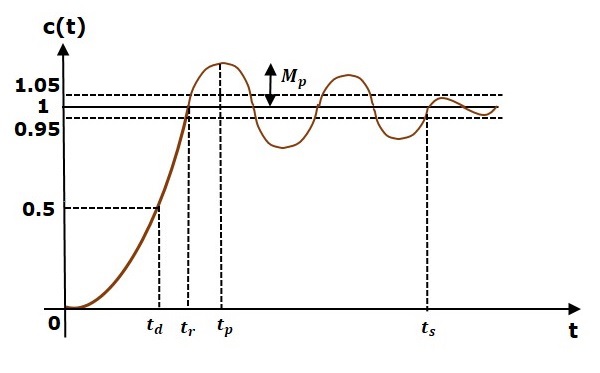
所有时间域规范都显示在图中。稳定时间之前的响应称为瞬态响应,稳定时间之后的响应称为稳态响应。
延迟时间
这是响应从零时刻达到最终值的一半所需的时间。它用 $t_d$ 表示。
考虑二阶系统对 t &ge 的阶跃响应0,当'δ' 介于 0 和 1 之间时。
$$c(t)=1-left ( ffrac{e^{-delta omega_nt}}{sqrt{1-delta^2}} ight )sin(omega_dt+ heta)$$
阶跃响应的最终值为 1。
因此,在 $t=t_d$ 时,阶跃响应的值将为 0.5。将这些值代入上述公式。
$$c(t_d)=0.5=1-left ( ffrac{e^{-deltaomega_nt_d}}{sqrt{1-delta^2}} ight )sin(omega_dt_d+ heta)$$
$$Rightarrow left ( ffrac{e^{-deltaomega_nt_d}}{sqrt{1-delta^2}} ight )sin(omega_dt_d+ heta)=0.5$$
通过使用线性近似,您将得到延迟时间 td为
$$t_d=ffrac{1+0.7delta}{omega_n}$$
上升时间
这是响应从0% 上升到其最终值的 100% 所需的时间。这适用于欠阻尼系统。对于过阻尼系统,考虑从最终值的 10% 到 90% 的持续时间。上升时间用 tr 表示。
当 t = t1 = 0 时,c(t) = 0。
我们知道阶跃响应的最终值为 1。
因此,在 $t = t_2$ 时,阶跃响应的值为 1。将这些值代入以下等式中。
$$c(t)=1-left ( ffrac{e^{-delta omega_nt}}{sqrt{1-delta^2}} ight )sin(omega_dt+ heta)$$
$$c(t_2)=1=1-left ( ffrac{e^{-deltaomega_nt_2}}{sqrt{1-delta^2}} ight )sin(omega_dt_2+ heta)$$
$$Rightarrow left ( ffrac{e^{-deltaomega_nt_2}}{sqrt{1-delta^2}} ight )sin(omega_dt_2+ heta)=0$$
$$Rightarrow sin(omega_dt_2+ heta)=0$$
$$Rightarrow omega_dt_2+ heta=pi$$
$$Rightarrow t_2=ffrac{pi- heta}{omega_d}$$
将 t1 和 t2 值代入以下上升时间方程中,
$$t_r=t_2-t_1$$
$$ 因此 : t_r=ffrac{pi- heta}{omega_d}$$
从上述方程中,我们可以得出结论,上升时间 $t_r$ 和阻尼频率 $omega_d$ 成反比。
峰值时间
这是响应首次达到峰值所需的时间。用$t_p$表示。在$t = t_p$时,响应的一阶导数为零。
我们知道,对于欠阻尼情况,二阶系统的阶跃响应为
$$c(t)=1-left ( ffrac{e^{-delta omega_nt}}{sqrt{1-delta^2}} ight )sin(omega_dt+ heta)$$
对't'求$c(t)$的导数。
$$ffrac{ ext{d}c(t)}{ ext{d}t}=-left ( ffrac{e^{-deltaomega_nt}}{sqrt{1-delta^2}} ight )omega_dcos(omega_dt+ heta)-left ( ffrac{-deltaomega_ne^{-deltaomega_nt}}{sqrt{1-delta^2}} ight )sin(omega_dt+ heta)$$
代入上述等式中的 $t=t_p$ 和 $ffrac{ ext{d}c(t)}{ ext{d}t}=0$。
$$0=-left ( ffrac{e^{-deltaomega_nt_p}}{sqrt{1-delta^2}} ight )left [ omega_dcos(omega_dt_p+ heta)-deltaomega_nsin(omega_dt_p+ heta) ight ]$$
$$Rightarrow omega_nsqrt{1-delta^2}cos(omega_dt_p+ heta)-deltaomega_nsin(omega_dt_p+ heta)=0$$
$$Rightarrow sqrt{1-delta^2}cos(omega_dt_p+ heta)-deltasin(omega_dt_p+ heta)=0$$
$$Rightarrow sin( heta)cos(omega_dt_p+ heta)-cos( heta)sin(omega_dt_p+ heta)=0$$
$$Rightarrow sin( heta-omega_dt_p- heta)=0$$
$$Rightarrow sin(-omega_dt_p)=0Rightarrow -sin(omega_dt_p)=0Rightarrow sin(omega_dt_p)=0$$
$$Rightarrow omega_dt_p=pi$$
$$Rightarrow t_p=ffrac{pi}{omega_d}$$
从上式可知,峰值时间$t_p$与阻尼频率$omega_d$成反比。
峰值过冲
峰值过冲Mp定义为峰值时间响应与最终响应值的偏差。它也被称为最大过冲。
从数学上讲,我们可以将其写成
$$M_p=c(t_p)-c(infty)$$
其中,
c(tp) 是响应的峰值。
c(∞) 是响应的最终(稳定状态)值。
在 $t = t_p$ 时,响应 c(t) 为 -
$$c(t_p)=1-left ( ffrac{e^{-deltaomega_nt_p}}{sqrt{1-delta^2}} ight )sin(omega_dt_p+ heta)$$
将 $t_p=ffrac{pi}{omega_d}$ 代入上述等式的右边。
$$c(t_P)=1-left ( ffrac{e^{-deltaomega_nleft ( ffrac{pi}{omega_d} ight )}}{sqrt{1-delta^2}} ight )sinleft ( omega_dleft ( ffrac{pi}{omega_d} ight ) + heta ight )$$
$$Rightarrow c(t_p)=1-left ( ffrac{e^{-left ( ffrac{deltapi}{sqrt{1-delta^2}} ight )}}{sqrt{1-delta^2}} ight )(-sin( heta))$$
我们知道
$$sin( heta)=sqrt{1-delta^2}$$
因此,我们将得到 $c(t_p)$
$$c(t_p)=1+e^{-left ( ffrac{deltapi}{sqrt{1-delta^2}} ight )}$$
将 $c(t_p)$ 和 $c(infty)$ 的值代入峰值超调方程中。
$$M_p=1+e^{-left ( ffrac{deltapi}{sqrt{1-delta^2}} ight )}-1$$
$$Rightarrow M_p=e^{-left ( ffrac{deltapi}{sqrt{1-delta^2}} ight )}$$
峰值超调百分比 % $M_p$ 可以使用以下公式计算公式。
$$\%M_p=ffrac{M_p}{c(infty )} imes 100\%$$
将$M_p$和$c(infty)$的值代入上述公式中,可得到峰值超调量百分比$\%M_p$为
$$\%M_p=left ( e^ {-left ( ffrac{deltapi}{sqrt{1-delta^2}} ight )} ight ) imes 100\%$$
从上述公式中,我们可以得出,如果阻尼比$delta$增加,峰值超调量百分比$\%M_p$将会降低。
稳定时间
这是响应达到稳定状态并保持在规定范围内所需的时间最终值周围的公差带。一般情况下,公差带为 2% 和 5%。稳定时间用 $t_s$ 表示。
5% 公差带的稳定时间为 -
$$t_s=ffrac{3}{deltaomega_n}=3 au$$
2% 公差带的稳定时间为 -
$$t_s=ffrac{4}{deltaomega_n}=4 au$$
其中,$ au$ 是时间常数,等于 $ffrac{1}{deltaomega_n}$。
稳定时间 $t_s$ 和时间常数 $ au$ 都与阻尼比 $delta$ 成反比。
稳定时间 $t_s$ 和时间常数 $ au$ 都与阻尼比 $delta$ 成反比。
稳定时间 $t_s$ 和时间常数 $ au$ 都与阻尼比 $delta$ 无关系统增益。这意味着即使系统增益发生变化,稳定时间 $t_s$ 和时间常数 $ au$ 也永远不会改变。
示例
现在让我们找到一个控制系统的时间域规范,该系统具有闭环传递函数 $ffrac{4}{s^2+2s+4}$,当单位阶跃信号作为该控制系统的输入时。
我们知道二阶闭环控制系统传递函数的标准形式为
$$ffrac{omega_n^2}{s^2+2deltaomega_ns+omega_n^2}$$
通过将这两个传递函数相等,我们将得到无阻尼自然频率 $omega_n$ 为 2 rad/sec,阻尼比 $delta$ 为 0.5。
我们知道阻尼频率的公式$omega_d$ 为
$$omega_d=omega_nsqrt{1-delta^2}$$
代入上述公式中的 $omega_n$ 和 $delta$ 值。
$$Rightarrow omega_d=2sqrt{1-(0.5)^2}$$
$$Rightarrow omega_d=1.732 : rad/sec$$
代入以下关系中的 $delta$ 值
$$ heta=cos^{-1}delta$$
$$Rightarrow heta=cos^{-1}(0.5)=ffrac{pi}{3}:rad$$
代入每个时间域规范公式中的上述必要值并简化以便获得给定传递函数的时间域规范值。
下表显示了时间域规范的公式、必要值的代入以及最终值。
| 时间域规范 | 公式 | 公式中的值替换 | 最终值 |
|---|---|---|---|
延迟时间 |
$t_d=ffrac{1+0.7delta}{omega_n}$ |
$t_d=ffrac{1+0.7(0.5)}{2}$ |
$t_d$=0.675秒 |
上升时间 |
$t_r=ffrac{pi- heta}{omega_d}$ |
$t_r=ffrac{pi-(ffrac{pi}{3})}{1.732}$ |
$t_r$=1.207 秒 |
峰值时间 |
$t_p=ffrac{pi}{omega_d}$ |
$t_p=ffrac{pi}{1.732}$ |
$t_p$=1.813 秒 |
% 峰值过冲 |
$\%M_p=left( e^{-left (ffrac{deltapi}{sqrt{1-delta^2}} ight ) } ight ) imes 100\%$ |
$\%M_p=left( e^{-left (ffrac{0.5pi}{sqrt{1-(0.5)^2}} ight ) } ight ) imes 100\%$ |
$\% : M_p$=16.32% |
2% 公差带的稳定时间 |
$t_s=ffrac{4}{deltaomega_n}$ |
$t_S=ffrac{4}{(0.5)(2)}$ |
$t_s$=4 秒 |